Tony Tao | 陶龙I am a second year M.S. Robotics Student at the Robotics Institute at Carnegie Mellon University, advised by Deepak Pathak. I completed my Bachelor's degree at Carnegie Mellon in 2024. Previously, I've had the pleasure of being advised by Guanya Shi and have spent time working with Zeynep Temel and Oliver Kroemer I am actively seeking PhD opportunities starting in Fall 2026. Email: tonytao [at] cmu.edu |

|
ResearchI'm interested in robot learning, computer vision, and building robots that can generalize to many tasks and environments. You can also find my papers on my Google Scholar |
DexWild: Dexterous Human Interactions for In-the-Wild Robot PoliciesTony Tao*, Mohan Kumar Srirama*, Jason Jingzhou Liu, Kenneth Shaw, Deepak pathak
RSS, 2025
website |
code |
video |
youtube |
paper |
Best Paper Award at EgoAct Workshop 🏆 DexWild introduces a dexterous human data collection system that works in diverse environments, without robots. We collect 9,290 human demos across 93 environments and show that cotraining with robot data unlocks generalization. In unseen scenes, Dexwild performs 3.8x better than training with robot data only. |
|
|
FACTR: Force-Attending Curriculum Training for Contact-Rich Policy LearningJason Jingzhou Liu*, Yulong Li*, Kenneth Shaw, Tony Tao, Ruslan Salakhutdinov, Deepak Pathak
RSS, 2025
website |
code |
paper |
We present a low-cost bilateral teleoperation setup that allows you to feel what the robot is feeling. To leverage this force information, we present FACTR—a state-of-the-art policy learning framework designed to guide policies in attending to force information during training |
|
AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive MobilityWenli Xiao*, Haoru Xue*, Tony Tao, Dvij Kalaria, John M. Dolan, Guanya Shi
ICRA, 2025
website |
code |
youtube |
media |
paper |
AnyCar is a transformer-based dynamics model that can adapt to various vehicles, environments, state estimators, and tasks. We train a generalist model that exceeds specialist model capabilites across various different settings. |
|
Agile Mobility with Rapid Online Adaptation via Meta-learning and Uncertainty-aware MPPIDvij Kalaria, Haoru Xue, Wenli Xiao, Tony Tao, Guanya Shi, John M. Dolan
ICRA, 2025
website |
code |
paper |
This paper presents a meta-learning-based model adaptation approach for agile robotic mobility, integrating uncertainty-aware Model Predictive Path Integral (MPPI) control to enable rapid online adaptation to dynamic environments across various wheeled robot platforms. |
|
Linear Delta Arrays for Compliant Dexterous Distributed ManipulationSarvesh Patil, Tony Tao, Tess Hellebrekers, Oliver Kroemer, F. Zeynep Temel
ICRA, 2023
paper |
Delta Arrays demonstrate dexterous manipulation capabilities of a new type of distributed dexterous manipulator. We show a wide range of capablities for performing coordinated distributed manipulation including translation, alignment, prehensile squeezing, lifting, and grasping. |
ExperienceHere are some cool experiences that I've had. |
|
VP of Race Operations | 23e/24e Race CarCarnegie Mellon Racing, 2024 website | As the VP of Race Operations for two years, I doubled the size of the team to 25 people and reorganized the department structure to better support my team members. While I did make individual contributions to the team, including the setting up of Jira projects to facilitate better project tracking, vehicle performance testing and tuning metrics, and securing $29,500+ of sponsorships through networking with companies, my proudest contribution was cultivating a team culture and environment where each member is supported to work on what they are most passionate about. Throught supporting my members, we were able to develop subteams in vehicle dynamics, data analytics and telemetry, driver training, and special projects. My work culminates at our yearly competitions, where I lead a 50+ person team to maximize competition performance. |

|
TPM Intern | Prototyping TeamZoox (Amazon Subsidiary), 2023 website | I led 7 different projects which interacted with teams such as Industrial Design Studio, Active Suspension, IT Wireless Networking, Customer Experience, Perceptions, Vehicle Integration, Hardware Testing, etc. For these projects, I worked with 8 full-time engineers on our team (mechanical, electrical, systems) to complete the projects on schedule. I also designed and implemented 5 process improvements that improved engineering, outsourcing, and rapid production workflow. Lastly, I presented weekly staff updates to the VP of Manufacturing Operations. |
|
Teaching Assistant | Robot Kinematics and DynamicsRobotics Institute, Carnegie Mellon University, 2022 website | video | Taught students important concepts such as forward kinematics, analytical and numerical inverse kinematics, differential kinematics, dynamics, and Denavit-Hartenberg parameters in 3D. Help support student learning through in-class problems, office hours, and organized course homework structure. Give students experience working with the nuances of real robots through our Jenga tower capstone project. |
ProjectsBelow are some cool projects that I've had the pleasure to work on. |
|
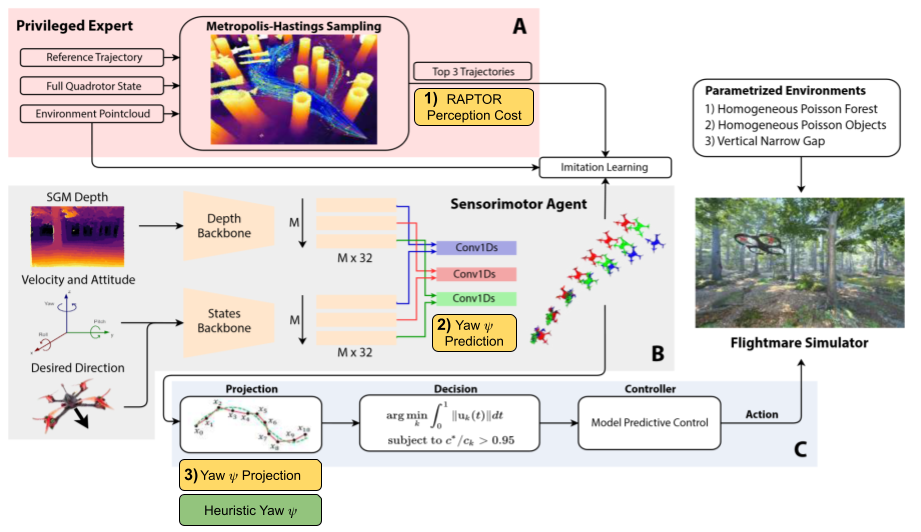
Learning High Speed Flight in the WildRobot Learning (Course), 2024 paper | To perform agile flight through previously unseen environments, a sensorimotor policy is trained using a teacher-student imitation learning framework. We hypothesize that adding a notion of perception awareness and using a yaw that encourages exploration of unknown spaces along the trajectory could help the quadrotor detect obstacles sooner and perform better overall. We draw inspiration from the yaw-angle planning module in RAPTOR, where they select a yaw angle that maximizes the total information gain, and explore other methods such as our heuristic-based yaw approximation method. |
|
Squirtle | EV Thermal Emergency RobotRobotics Capstone (Course), 2024 paper | video | slides | Electric vehicle fires are extremely dangerous and difficult to extinguish. It can take up to 24 hours, exposing firefighters to toxic gases, high temperatures, and electrical hazards. Our system is built to provide the highest level of safety to firefighters in a robust robotic package that automates the cooling of the battery pack. We build our system with the end user in mind, ensuring that anybody will be able to effectively use our system with little training in a variety of scenarios. |
|
Driverless Braking System | 22a Race CarCarnegie Mellon Racing, 2024 This was first driverless braking system that our team has ever implemented and is intended to be fully rules compliant with the Formula Student Germany competition. I was responsible for the mechanical design, manufacturing, and testing of the system to allow the car to be able to brake in both autonomous and human drivered modes. |
|
3D Object Generative ModelsIntermediate Deep Learning (Course), 2024 paper | The images on the left show some results that I achieved using a Variational Autoencoder Model that we trained on the OmniObject3D dataset. We also explored other model architectures such as Diffusion and GANs but we found that they performed worse than the VAE. |

|
Steering Wheel System | 23e Race CarCarnegie Mellon Racing, 2023 video | The steering wheel system of our 2023 FSAE racecar featured many improvements in ergonomics, reliability, and repairability. I implemented a innovative angle sensing hand actuated paddle on the back of the steering wheel, which gave our drivers the ability to precisely modulate regenerative braking in our electric vehicle. (The world’s first implementation of such a system) |
|
Dashboard System | 23e Race CarCarnegie Mellon Racing, 2023 video | The dashboard system of our 2023 FSAE racecar was a reimagination of our front electronics architecture. We moved from an integrated steering wheel to a distributed steering and dashboard split electrical architecture. This allowed us to properly waterproof all components and implement a large 5 inch screen for displaying key vehicle information. As the system lead, I was in charge of the design, manufacturing, and testing of the entire system. |
|
Soccer Goal KeeperFeedback Control Systems (Course), 2022 video | video #2 | We built a a goalkeeper that was able to block an orange ping pong ball from entering through the front of the goal. We have a camera mounted on the top of the system looking down at the 4 fiducial markers which allows us to figure out where the ball is relative to the goal. We calculate the trajectory of the ball and the arm swings from side to side to block the ball. |
|
Pedals System | 22e Race CarCarnegie Mellon Racing, 2022 The pedals system of our 2022 FSAE racecar featured a massive change in architecture with goals to improve adjustability to better customize the experience for each driver. We restructured the pedals to be mounted on a baseplate which spanned across the chassis of the car, which allowed us to slide the pedals forwards and backwards for drivers of different heights. |

|
Driver Ergonomics RigCarnegie Mellon Racing, 2021 The driver ergonomics rig was designed to be an adjustable ergonomics testing rig and a driving simulator at the same time. We use it to validate chassis dimensions and the positioning of driver-centric components such as the steering wheel and pedals. I was in charge of designing the pedals subassembly. |
|
|
|
Design and source code from Jon Barron's website |